文化遺産3Dドキュメンテーションの新たな動向
文化遺産3Dドキュメンテーションの新たな動向
Emerging Trends in 3D Documentation of Cultural Heritage
野口 淳 Atsushi NOGUCHI
はじめに
3D計測は、複雑で立体的な形状を有する有形の文化遺産の状態をあるがままに記録することに適している。今日の技術的スタンダードとなっている、レーザー・LiDAR計測、3D写真計測の普及・一般化により、多くの文化遺産が3Dで記録されている。最初期のプロジェクトでは、デジタルデータとしての保存、実物のバックアップという意義が強かったが、その後はウェブプラットフォームなどを通じての公開・共有、サードパーティを含めた利活用が進んでいる。
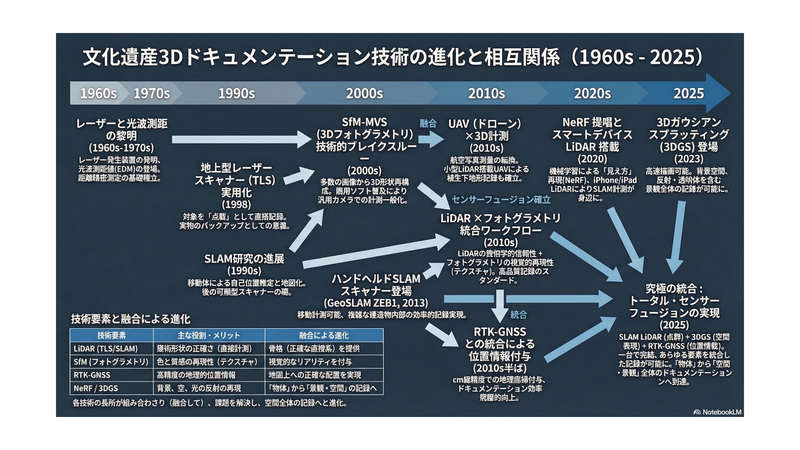
そのような中で、異なる機器・手法の融合(センサーフュージョン)、異なる記録データの統合表現(マルチモーダル)、そして新たな技術の開発と実用化が進んでいる。これにより、記念物・建造物などのソリッドな(緻密で固定的な)面で構成される建造物・記念物だけでなく、それらを含む空間や景観、さらに動作などを含む可動要素の記録も可能になってきた。そうした文化遺産3Dドキュメンテーションの新しい動向を紹介する。
1. 文化遺産3Dドキュメンテーションのあゆみ:LiDARスキャンと3Dフォトグラメトリ
1960年のレーザー発生装置の発明、1970年代の光波測距儀を経て、1990年代のSOISICスキャナー、1998年のCyraxスキャナーの登場により、地上型レーザー/ LiDARスキャナー(TLS: Terrestrial LiDAR Scanner)が実用化した。以後、360度、高速・広範囲・高密度のスキャンが可能になり、また機器自体の小型化・簡易化と低価格化も進んだ [1]。光の照射・反射による距離測定により、対象のソリッドな表面を測定点の集合=点群として記録するものである。2025年時点では、高精細なカメラ画像(動画を含む)にもとづくRGBカラー点群の記録も一般化している。
LiDARスキャンとは別に、写真測量(フォトグラメトリ)の技術をコンピュータービジョン技術により発展させた、新世代の3D計測手法が、SfM-MVS(Structure fromo Motion + Multi-View Stereo)による3Dフォトグラメトリである。従来のフォトグラメトリが撮影位置を厳密に計測した2台以上のカメラ、または2枚以上の画像を必要としたのに対して、連続する画像中の特徴点検出と再投影によりカメラ位置・姿勢推定を行うSfMは自由に撮影された多数の画像から3D形状を再構成することを可能にした [2]。技術的ブレイクスルーは2000年代に見られ、2010年代にはUAV(ドローン)との結びつきにより航空写真測量の転換をもたらした。2010年代半ばには複数の商用ソフトが市販され、UAVだけでなく地上撮影も含めて普及が進んだ。
なおLiDARスキャンは対象表面での光の反射により距離を直接計測するが、ステレオペア画像の視差にもとづく立体視により画像内の深度(Depth:奥行き)情報を復元するフォトグラメトリは距離を直接計測しない、間接計測であることに注意しておく必要がある。
LiDARスキャナーと3Dフォトグラメトリは2010年代半ばには文化遺産3Dドキュメンテーションのスタンダードとして確立され、今日に至っている。
2. LiDARスキャンの発展
TLSは、計測器の設置場所(機械点)を中心として放射状に点群を記録する。複数機械点の計測データは、機械点の位置を記録、または取得された点群の相互関係から復元され、バンドル調整を経て統合される。これに対して、計測機器(センサー)が移動しながら、取得した画像情報や点群情報からリアルタイムに周囲の環境を再構築、自己位置を推定するのがSLAM(Simultaneaous Localization And Mapping)技術である。画像情報を使用するものは特にVSLAM(Visual SLAM)とも呼ばれる。
1990年代後半以降、移動体の自動操縦に関するロボット工学分野で開発が進み、その後、2013年にはGeoSLAM ZEB1がハンドヘルドの可搬型SLAMスキャナーとして商品化された。計測位置が固定されないため、複雑な形状の建造物内部の記録に適している。また2020年以降のProモデルにLiDARセンサーが搭載されたiPhone/ iPadによる3DスキャンもSLAM LiDARの一種である [3]。
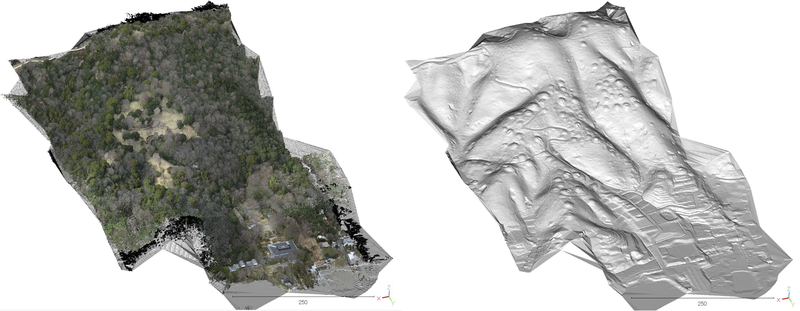
またLiDARスキャナーをヘリコプター等に搭載して上空からマルチリターン計測を行うことにより、植生被覆下の地表および構造物の計測を行う手法が2000年代を通じて研究されてきた [4]。その後、計測機材の小型化とUAVへの搭載が可能になり、2010年代にはRIegl、YellowScanなどが市販されたことにより応用事例が一気に広まった。UAVフォトグラメトリでは上空から見下ろした時の表面、すなわち森林では林冠の上面しか計測記録できないが、UAV-LiDARスキャンによるグラウンドデータは植生被覆下の地形も詳細に記録できる(図1)[5]。
LiDARスキャンは、計測実施に専用機材を必要とする点で、汎用のカメラを利用可能な3Dフォトグラメトリより専門性が高いと言えるが、一方で用途ごとに特化した機材が開発されることで多様な文化遺産の計測記録に用いられている。
3. LiDARスキャンとフォトグラメトリのセンサーフュージョン
前述のとおり3Dフォトグラメトリは視差に基づく深度推定により3D形状を復元する。直接計測のLiDARスキャンとは異なり、結果の精度や品質は画像と撮影方法に依存する。レンズ・キャリブレーションやその他のカメラ・パラメーターの補正もあり、SfM解析処理後の調整も可能である。しかし特徴に乏しい対象(たとえば単色の平面)や、環境光・照明条件による影響もあり得る。この点で、光の速度や波長という物理定数に基づき、器械精度を評価することができるLiDARスキャンに劣後するという考え方もある。特に、距離や幾何形状を数値的に計測する用途の場合、LiDARスキャンが求められることがある [6]。
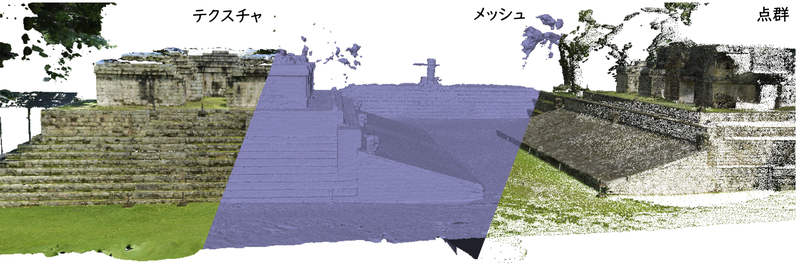
一方で、3Dフォトグラメトリは入力画像セットからテクスチャを構築するため、色情報についてフォトリアリスティックな再現性に優れている。最近のLiDARスキャナーは高精細画像からRGB色情報を取得できるものが多いが、点群とテクスチャでは視覚的な再現性(または詳密度)に格段の差がある(図2)。
そこで両者の特性を活かして、信頼度(または正確さ:Accuracy)が高く、かつフォトリアリスティックな再現性を得られる手法として、LiDARスキャンとフォトグラメトリの融合=センサーフュージョンが用いられる [7]。
代表的な手順は、概ね以下の通りである。あらかじめ配置しておいた評定点、またはLiDAR点群とSfMで得られた特徴点を重ね合わせ、同一の座標系に統合する。LiDAR点群のみ、またはSfMによる深度推定を併用してメッシュを作成し、SfMの入力画像セットからテクスチャを構築する。これにより、信頼度の高いLiDAR点群を骨格として再現性の高いテクスチャを与えられた3Dモデルを構築することができる。
このワークフローは、高品質な計測記録が要請される場合に用いられている。
4. GNSS測位技術と3D計測の融合
文化遺産のドキュメンテーションでは、対象の立体形状だけでなく位置情報が重要となる。LiDARスキャンでも3Dフォトグラメトリでも地理座標を直接計測することができないため、従来のワークフローでは事前に設置した基準点・評定点を測り込んで後から座標を与える必要があった。
cm級の精度でGNSS(GPSを含む)衛星測位を広範囲に可能にするネットワークRTK(Rial Time Kinematic)技術の発展とアンテナ・受信機の小型化により、2010年代半ばには市販UAVへの搭載が進んだ。これにより地上評定点(GCP:Ground Control Point)の数を減らすことや、場合によってはGCP無しでの一座標の付与が可能になる。取得された計測データは、座標付与の後工程無しで、かつ極めて小さな誤差で地図上に位置付けることが可能になるため、文化遺産ドキュメンテーションの効率化と再利用可能性において優れている。
また最近では、RTK-GNSSが組み込まれているタイプのハンドヘルドSLAM-LiDARスキャナーも市販されている。位置座標付きの点群が取得されるだけでなく、屋外で測位衛星電波を受信可能な環境下では、高精度位置座標が自己位置推定にも利用され精度の向上につながっている。
さらにRTK-GNSSユニットをデジタルカメラと組み合わせることで、シャッター動作時の高精度位置座標とIMUによる姿勢情報を画像のexif情報に書き込む機材も市販された8)。これにより取得されたデジタル画像セットを用いることで、RTK-GNSSによる位置座標で制御された3Dフォトグラメトリが可能になる。構築された3Dモデルは、フォトリアリスティックな再現性と高精度位置座標を併せ持つものとなる。
こうした高精度GNSS測位技術と3D計測の融合により、文化遺産の保全・管理にもきわめて有効な3Dデータの取得が可能になっている。
5. 新しい3Dフォトグラメトリ:NeRFとガウシアン・スプラッティング
SfMによる深度推定は視差に基づくため、遠距離の物体や背景空間への適用は困難となる。光の反射により距離計測を行うLiDARスキャンも、光線の強度、対象物の反射率、ビーム拡散、センサーの感度と環境ノイズなどにより計測距離に制約がある。当然、反射が得られない背景空間の計測はできない。このため屋外の建造物や記念物等の3D計測を行うと、対象を取り巻く空間は空白(ボイド)となる。
文化遺産の意義、価値について、対象となるアイテムの物質性だけでなく、それを取り巻く景観を含めた環境の中でのあり方も含めて考える時、このような3D計測の制約はある意味致命的であった。単なる物体形状の記録としてだけでなく、文化遺産の存在的価値のドキュメンテーションを目指す時、従来の3D計測には限界があった。
コンピューターグラフィックスによる「スカイボックス」の適用は、従来の3D計測成果の空白を補完する一つの手法である。物理ベースレンダリング(PBR:Physical Based Rendering)により、3D計測データに基づくモデルとスカイボックス全体の陰影、光の反射・屈折を計算(シミュレーション)により描画することで、現実感のある空間の表現が可能になる。しかしそれはあくまで数値的に再現された仮想的な空間の状態であり、ある時点における実際の空間の状態の記録とは異なる。
これに対して、SfMの入力デジタル画像セットを用いて、空間内のある点における放射輝度(Radiance)と不透明度(Opacity)を情報化することにより、ある場所における「見え方」を再現可能にしたのが、新しい3DフォトグラメトリとしてのNeRF(Neural Radiance Fields)[9]と3Dガウシアンスプラッティング(3DGS: 3D Gaussian Splatting)[10]である。いずれも原著論文の公表後、きわめて短時間で複数のアプリで実装され普及した。
その技術的な詳細は割愛するが、いずれも視点依存的(view-dpependent)な「見え方」を機械学習により情報化するものである。NeRFでは情報化されたシーンの描画に複雑な計算を要するが、3DGSでは情報をガウス分布として持つ楕円体のスプラット(飛沫)を重ねて描画する手法を取るためデータサイズは大きくなるが描画処理は高速化される。このため現時点(2026年3月)では、高速描画の特性により3DGSの応用が多く見られる。
これらの技術の登場と実装は、文化遺産の3Dドキュメンテーションに空間・景観を含することを可能にした。これにより、たとえば庭園の様に固定的な要素だけでなく、時間的な変化(例えば季節)を内包するものや、反射の強い金属や透明度の高いガラス、水面など固定的でない面を構成要素に含む文化遺産も、3Dドキュメンテーションのメニューに加えることが可能になった。
6. さらに進むセンサーフュージョン:LiDAR点群と3DGS、RTK-GNSS
NeRFや3DGSはデジタル画像セットを入力データとし、カメラ位置と姿勢の推定にはSfMを用いる。従って、先に触れたLiDARスキャンと3Dフォトグラメトリのセンサーフュージョンの手法が適用可能になる。
これを、別個とのLiDARスキャンとカメラ撮影で行うのではなく、ハンドヘルドSLAM LiDARスキャナーで一体的に行うことが可能な機材が、2025年に相次いで市販された。その中にはRTK-GNSSも組み込まれているものもある。
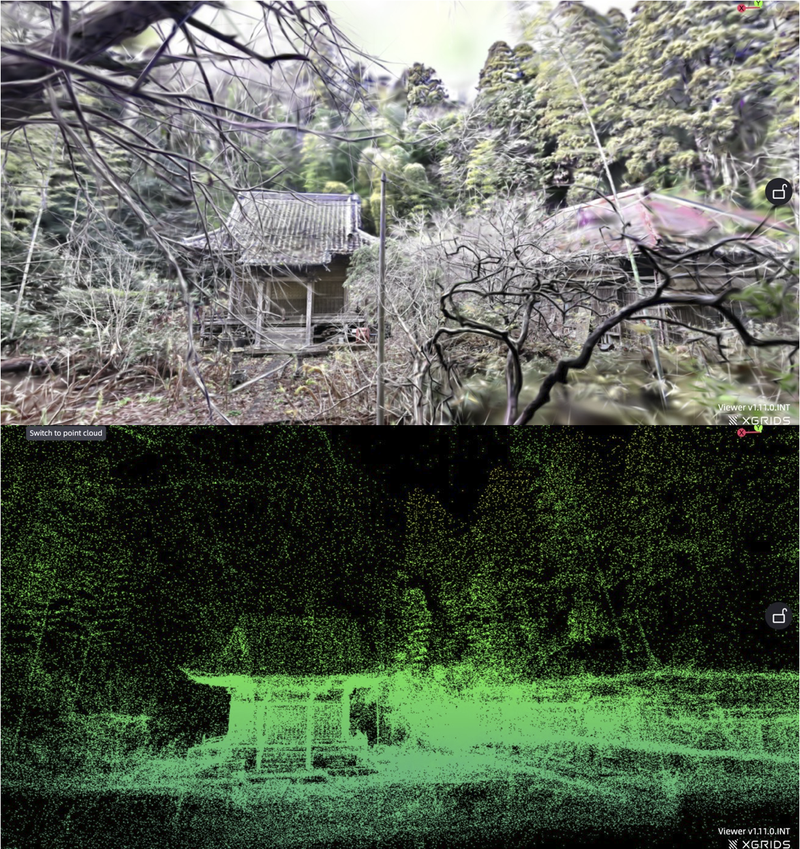
これにより、信頼度の高い距離計測的な形状情報(LiDAR点群)と高精度位置情報をあわせもち、背景空間までをカバーするフォトリアリスティックな再現性をもった文化遺産3Dドキュメンテーションが可能になった(図3)。
これまで見た来たとおり、LiDARスキャンと3Dフォトグラメトリについては基礎技術の確立から実用化と普及まで十数年を必要とした。しかし一度それらが実用化されると、応用的な発展と手法の融合が5〜10年程度のスパンで進展した。そして今、新しい要素技術の提唱から実装まで1〜2年と変化と革新のスパンはさらに短縮され、実用化とほぼ同時に従来手法との融合が実現している。
現在、文化遺産3Dドキュメンテーションは著しい技術的な発展と応用分野の広がりのフェーズに入ったと言えるだろう。
おわりに
このタイミングでCIPA日本委員会が積極的な活動を再開したのは偶然ではない。国際的な動向をキャッチアップし、また日本国内外における実践例を紹介共有することで、ICOMOSによる文化遺産保護の活動に貢献できるように活動を進める予定である。関心のある方々のご参加をお待ちする。
注
[1] https://scantech-international.com/blog/timeline-of-3d-laser-scanners
[2] J. L. Schonberger and J.-M. Frahm (2016) Structure-From-Motion Revisited. 2016 IEEE Conference on CVPR. https://doi.org/10.1109/CVPR.2016.445
[3] ただしApple社は、自社の技術を、LiDAR、カメラ画像、IMU(慣性センサー)を併用した独自のVIO(Visual Inertial Odometry:視覚慣性自己位置推定)としている。https://developer.apple.com/jp/documentation/arkit/world_tracking/understanding_world_tracking/
[4] M. Doneus, C. Briese, M. Fera, M.Janner (2008) Archaeological prospection of forested areas using full-waveform airborne laser scanning. Journal of Archaeological Science, 35 https://doi.org/10.1016/j.jas.2007.06.013
[5] 野口 淳(2023)「遺跡探索におけるUAV-LiDAR計測の有効性」『遺跡踏査とデジタル技術』http://doi.org/10.24484/sitereports.132481-121415
[6] ただしSLAM LiDARでは自己位置推定が介在するため、TLSによるLiDAR点群のような器械精度の評価が困難となる。
[7] 平山智予・長坂匡幸(2024)「文化財建築3Dアーカイブ―フォトグラメトリとレーザースキャナの場合」『博物館DXと次世代考古学』(野口淳・村野正景編)、雄山閣
[8] 「一眼レフ・ミラーレス RTKフォトグラメトリ Drogger_ShotSync_RTK」Beyond your wall with Drogger (2026/1/26) https://drogger.hatenadiary.jp/entry/shotsync
[9] B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi, R. Ng (2020) NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis. arXiv https://arxiv.org/abs/2003.08934
[10] B. Kerbl, G. Kopanas, T. Leimkühler, G. Drettakis (2023) 3D Gaussian Splatting for Real-Time Radiance Field Rendering. ACM Transactions on Graphics, 42(4) https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/